KH-JD102 机械手实训装置
一、概述
KH-JD102 机械手实训装置的机械结构采用滚珠丝杆、滑杆、气缸、气夹等机械部件组成;电气方面有步进电机、步进电机驱动器、传感器、开关电源、电磁阀等电子器件组成;可编程控制器可采用目前市面上比较流行的各类PLC,如西门子、三菱或欧姆龙等。该模型是涵盖了PLC技术,位置控制技术、气动技术有机结合成一体的教学仪器。
二、实验目的
1.掌握PLC控制的基本原理、步进电机及驱动、直流电机、传感器等器件的原理及使用。
2.掌握位置控制技术、气动技术。
3.掌握机械传动原理及应用。
4.理解PLC的脉冲输出控制。
5.了解工业现场控制技术。
三、技术性能
1.输入电源:单相三线220V±10% 50Hz
2.工作环境:温度-10℃~+40℃ 相对湿度<85%(25℃) 海拔<4000m
3.绝缘电阻:大于3MΩ
4.外形尺寸:80×50×120cm3
四、实验设备
1.机械手模型 一台
2.计算机(用户自备) 一台
3.导线 若干
4.气泵(用户自备) 一台
5.晶体管输出型可编程控制器(带编程电缆)(用户自备) 一套
注:输入/输出端各不少于9个点
五、实验原理
1.步进电机
采用二相八拍混合式步进电机,主要特点:
体积小,具有较高的起动和运行频率,有定位
转矩等优点。本模型中采用串联型接法,其电
气图如下图所示:

2.步进电机驱动器
步进电机驱动器主要有电源输入部分、信号输入部分、输出部分等。驱动器参数如下
列图表所示:
(1)电气规格
|
说明 |
最小值 |
典型值 |
最大值 |
单位 |
|
供电电压 |
18 |
24 |
40 |
V |
|
均值输出电流 |
0.21 |
1 |
1.50 |
A |
|
逻辑输入电流 |
6 |
15 |
30 |
mA |
|
步进脉冲响应频率 |
— |
— |
100 |
kHz |
|
脉冲低电平时间 |
5 |
— |
1 |
μs |
(2)电流设定
|
电流值 |
SW1 |
SW2 |
SW3 |
|
0.21A |
OFF |
ON |
ON |
|
0.42A |
ON |
OFF |
ON |
|
0.63A |
OFF |
OFF |
ON |
|
0.84A |
ON |
ON |
OFF |
|
1.05A |
0FF |
ON |
OFF |
|
1.26A |
ON |
OFF |
OFF |
|
1.50A |
OFF |
OFF |
OFF |
(3)细分设定
|
细分倍数 |
步数/圈(1.8O整步) |
SW4 |
SW5 |
SW6 |
|
1 |
200 |
ON |
ON |
ON |
|
2 |
400 |
OFF |
ON |
ON |
|
4 |
800 |
ON |
OFF |
ON |
|
|
|
|
1600 |
|
|
|
|
|
3200 |
|
|
8 |
6400 |
OFF |
ON |
OFF |
|
16 |
12800 |
OFF |
ON |
OFF |
|
由外部确定 |
动态改细分/禁止工作 |
OFF |
OFF |
OFF |
(4)接线信号描述
|
信 号 |
功 能 |
|
PUL |
脉冲信号:上升沿有效,每当脉冲由低变高时电机走一步 |
|
DIR |
方向信号:用于改变电机转向,TTL平驱动 |
|
OPTO |
光耦驱动电源 |
|
ENA |
使能信号:禁止或允许驱动器工作,低电平禁止 |
|
GND |
直流电源地 |
|
+V |
直流电源正极,典型值+24V |
|
A+ |
电机A相 |
|
A- |
电机A相 |
|
B+ |
电机B相 |
|
B- |
电机B相 |
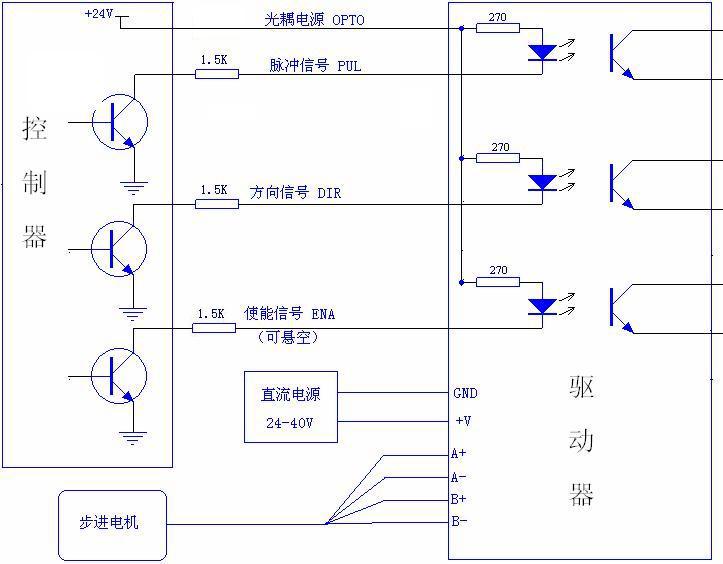
(5)PLC控制器与步进电机驱动器连接的工作原理如图所示:
驱动器电源由面板上电源模块提供,注意正负极性,驱动器信号端采用+24V供电,需加1.5K限流电阻(见图中1.5K电阻)。驱动器输入端为低电平有效,在使用不同厂家的PLC产品配套此模型使用时,要选择相应的输出方式,或者加入合适的电平转换板进行电平转换。
3.传感器:
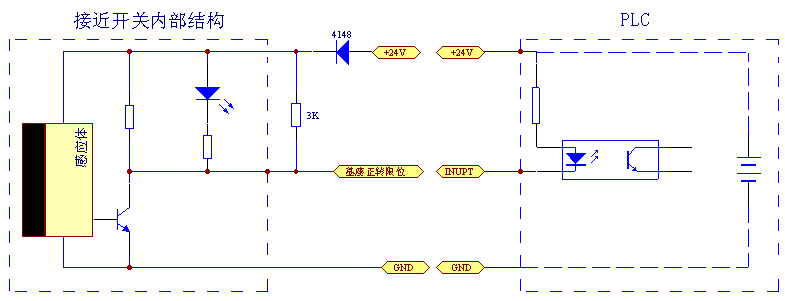
(1)接近开关:接近开关有三根连接线(棕、兰、黑)棕色接电源的正极、蓝色接电源的负极、黑色为输出信号,当与档块接近时输出电平为低电平,否则为高电平。与PLC之间的接线图如下,当传感器动作时,输出端对地接通。PLC内部光耦与传感器电源构成回路,PLC信号输入有效。
(2)行程开关:当档块碰到开关时,常开点闭合。
4. PLC:
本装置需采用晶体管输出型可编程控制器,可同时输出两路脉冲到步进电机驱动器,控制步进电机运行。
具体如何输出脉冲和如何接线请参考具体型号的PLC手册。
5.旋转码盘:
本装置中机械手每旋转3°编码盘发出一个脉冲。
6.直流电机驱动单元:
本装置中直流电机驱动模块是有两个继电器的吸合与断开来控制电机的转动方向的。
六、控制要求
1.开机复位 2.横轴前升 3.手旋转到位
4.电磁阀动作,手张开 5.竖轴下降 6.电磁阀动作,手夹紧
7.竖轴上升 8.横轴缩回 9.底盘旋转到位
10.横轴前伸 11.手旋转 12.竖轴下降
13.电磁阀动作,手张开 14.竖轴上升 15.复位
气夹在电磁阀未通电动作时为夹紧状态,通电后变为张开状态。在上述步骤中,4-5和13-15之间为电磁阀通电状态。
七、实验步骤
1.按下面要求接线
根据程序中对应的输入输出点分别接到模型中的各个接线端中,模型正常使用所用的输入输出端如下表所示:
(1)主机标准配置表
|
主机类型 |
9入9出(晶体管) |
|
西门子 |
CPU224(DC/DC/DC) (14入/10出) |
|
欧姆龙 |
FX1N-24MT-D 14入/10出 |
|
三菱 |
CPM2A-30CDT-D 18入/12出 |
(2)主机输入输出配置表
|
类型 |
|
|
|
端子功能 |
|
|
输入
|
|
气夹正转限位 |
|
|
气夹反转限位 |
I0.1 |
0001 |
X1 |
|
基座正转限位 |
I0.2 |
0002 |
X2 |
|
基座反转限位 |
I0.3 |
0003 |
X3 |
|
基座旋转脉冲 |
I0.4 |
0004 |
X4 |
|
X轴前限位 |
I0.5 |
0005 |
X5 |
|
X轴后限位 |
I0.6 |
0006 |
X6 |
|
Y轴上限位 |
I0.7 |
0007 |
X7 |
|
Y轴下限位 |
I1.0 |
0008 |
X10 |
|
|
|
输出
|
|
驱动器一PUL |
|
|
驱动器二PUL |
Q0.1 |
1001 |
Y1 |
|
驱动器一DIR |
Q0.2 |
1002 |
Y2 |
|
驱动器二DIR |
Q0.3 |
1003 |
Y3 |
|
气夹正转ML |
Q0.4 |
1004 |
Y4 |
|
气夹反转MR |
Q0.5 |
1005 |
Y5 |
|
基座反转MR |
Q0.6 |
1006 |
Y6 |
|
基座正转ML |
Q0.7 |
1007 |
Y7 |
|
气夹电磁阀YV- |
Q1.0 |
1014 |
Y10 |
2.面板接线
1)两个步进电机驱动器的电源由24V电源提供,将步进电机的OPTO端与本驱动器的+24V相连。
2)两个直流电机的电源由24V电源提供,MC接本模块的VCC。MR和ML端接PLC或电平转换板的输出端。
3)限位信号模块电源由24V电源提供,本模块的V-接模块电源的地。
4)电磁阀的YV+与电源模块的VCC。V-端接到PLC或电平转换板的输出端。
5)信号输入的VCC端接模块电源+24V,GND端接模块电源的地。
6)主机接线方法请参照输入输出分配表和CPU使用手册。
用下载线将计算机的COM口与PLC主机的串口相连,打开PLC电源。运行编程软件,打开实验程序,设置好通信参数后下载程序到PLC中。
注:如果遇到PLC连接不上的情况,请打开编程软件中有关通信端口的设置项目,然后重新下载。
八、梯形图参考程序(见光盘)
注意:步进电机固有的特性使的它运行在某个频率时会产生共振,在编写脉冲输出时,设定的频率值除细分数后避免在200-250之间。
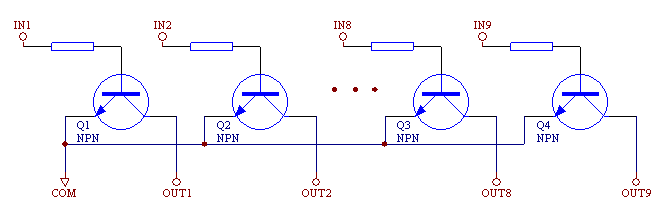
本模型所用输入输出均为低电平有效,在连接到PLC时要注意连接方式。配有主机的模型已经加装好电平转换板,可直接使用。不带主机的模型将随机附带一块电平转换板,当实际使用的主机为晶体管漏极输出型(西门子CPU224 DC/DC/DC主机)时,将转换板加在主机输出端与模型输入端之间即可正常使用。
电平转换板原理图如下图所示。其中IN端接PLC的输出端口,OUT端接模型的信号输入端。COM端接PLC的传感器电源负端。
九、操作使用
1.实验开始前先检查机械部件是否完好,各个串口是否插对位置。
2.控制面板分以下几个模块
(1)步进电机驱动及步进电机
仔细检查步进电机驱动器与控制面板的连线是否正确,将驱动器电流设定为1.5A,
细分设定为8细分。
将24V电源接入驱动器,此时驱动器的电源指示灯应点亮。
将24V与OPTO端(驱动器使能端)连接起来。
PUL端是脉冲输入端。
DIR是方向控制输入端。
(2)直流电机
本模型用的气夹电机和底座电机均是24V直流电机,PLC控制两个直流继电器的吸合来控制电机的正转和反转。
(3)旋转编码盘
在本模型底座上有一个旋转编码盘,在底座旋转时,在此产生一个VP-P为24V的方波信号,可以提供给PLC的高速计数器,用于机械手的定位控制。
(4)接近开关
在本模型中底座和气夹的限位通过4个电感式接近开关来完成。接近开关与触头接近时接近指示灯点亮、输出低电平,否则为高电平。
(5)行程开关
在本模型中两个滚珠丝杆的限位通过4个滚轴式行程开关来完成。当行程开关压下时,常开触点闭合,给PLC一个控制信号。
(6)电磁阀与平行气夹
本模型使用的电磁阀动作时平行气夹夹紧,动作则张开。
3.将交流电源通过三芯电源线连到模型上,打开电源开关,即可给模型上电。
4.按照实验指导书连接控制面板与PLC。
5.启动系统,模型按照要求正常动作。