一、电气组成
工业机械手实训装置电气部分主要由电源模块、可编程控制PLC模块及系统控制模块组成。上述模块上所有的电气元件均连接到面板安全插孔上,实训时用安全插线和各个模块相连接,提高实训装置的安全性。结构为拼装式,各个模块均为通用模块,可以互换。
二、三菱PLC主机
电源模块:三相电源总开关(带漏电和短路保护)、熔断器、单相电源插座用于模块电源连接和给外部设备提供电源,模块之间电源连接采用国标电源线连接。
PLC模块:主机采用三菱FX2N-48MT 晶体管输出,所有接口采用安全插连接。输入端接有钮子开关,可进行模拟输入。
系统控制模块:步进驱动器、继电器、指示灯、按钮所有接口均开放到面板,采用安全插连接。
三、电气接线图
一)工业机械手实训装置说明
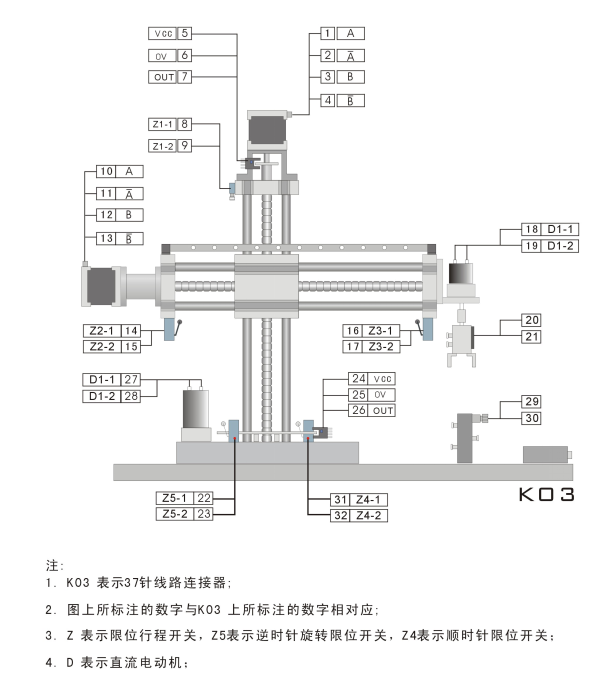
5.1~32表示与K03相对应的脚;
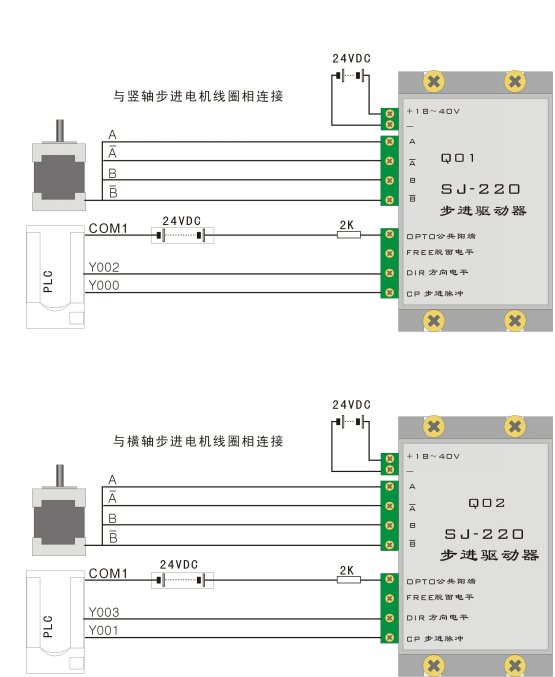
二)步进电机及驱动器说明
三)单电控电磁阀的说明
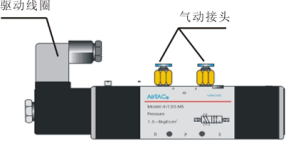
单相电磁阀示意图
注: 单向电控阀用来控制气缸单个方向运动,实现气缸的伸出、缩回运动。与双向电控阀区别在于双向电控阀初始位置是任意的,可以随意控制两个位置,而单控阀初始位置是固定的只能控制一个方向。
四)气动手爪
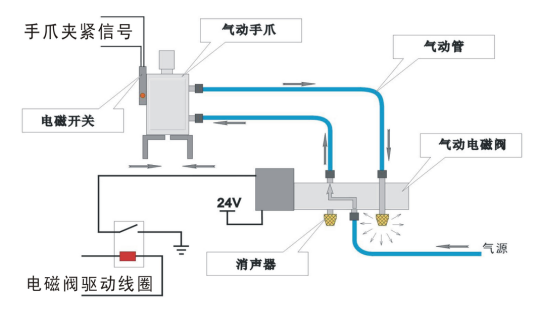
手爪控制示意图
上图中手爪夹紧由单向电控阀控制,当电控阀得电吸合时,手爪夹紧,当电控阀断电时,手爪张开。
四)三菱PLC控制原理图
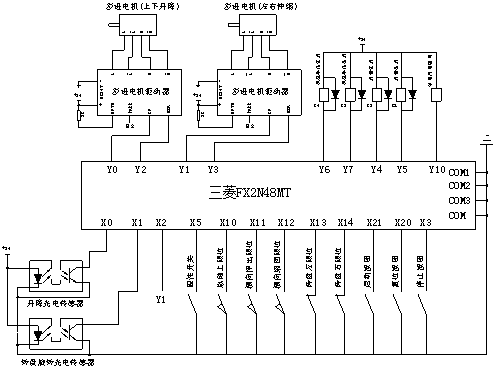
五)三菱I/O分配图
|
I/O名称 |
说 明 |
I/O名称 |
说 明 |
|
X000 |
竖轴旋转计数器 |
Y000 |
竖轴步进电机脉冲驱动 |
|
X001 |
底盘码盘旋转计数器 |
Y001 |
横向步进电机脉冲驱动 |
|
X005 |
机械手爪位置传感器 |
Y002 |
竖轴步进电机方向驱动 |
|
X010 |
竖轴向上限位开关 |
Y003 |
横向步进电机方向驱动 |
|
X011 |
横向伸出限位开关 |
Y004 |
转盘正转驱动 |
|
X012 |
横向缩回限位开关 |
Y005 |
转盘反转驱动 |
|
X013 |
底盘左限位 |
Y006 |
机械手正转驱动 |
|
X014 |
底盘右限位 |
Y007 |
机械手反转驱动 |
|
X020 |
复位开关 |
Y010 |
机械手抓紧&放松驱动 |
|
X021 |
启动开关 |
|
|
|
X3 |
停止 |
|
|